1. Introduction
연구 배경
- 최근 Deep Generative Models은 다양한 데이터 도메인에서 고품질 샘플 생성 성능을 보여왔으며, 이미지 및 오디오 생성에서 매우 높은 품질을 달성했다.
- GAN (Generative Adversarial Networks)
- Autogressive Models
- Flow-Based Models
- VAEs (Variational Autoencoders)
- 또한, GAN과 경쟁 가능한 이미지 생성 성능을 보이는 모델들도 등장하기 시작했다.
- EBM (Energy-Based Models)
- Score Matching 기반 Model
기존 연구(Diffusion)의 한계
- Diffusion 모델이 존재하기는 했으나, 고품질 샘플 생성 능력이 입증되지 않았다.
- 기존 확률 모델들과 비교했을 때, log-likelihood 성능의 경쟁력이 부족했다.
- 모델이 많은 비트를 사람이 인지 못하는 디테일 표현에 낭비했다.
Diffusion Probabilistic Model 제안
- Forward process
- 원래 이미지 x0에 아주 조금씩 Gaussian noise를 계속 추가하는 과정
- 모델이 학습하는 과정이 아니라, 사람이 정의하는 과정을 말한다.
- Reverse process
- noise를 없애 원래 이미지 x0로 다시 되돌리는 과정
- 모델이 학습하는 과정으로, 한 번에 복원하는 것이 아니라 한 step씩 조금씩 복원한다.
※ noise가 Gaussian이면, reverse도 Gaussian으로 설정 가능하다.
[Forward process]
x0 (원본 이미지)
-> x1 (조금 흐림)
-> x2 (더 흐림)
-> ...
-> xT (noise)
[Reverse process]
xT (Noise)
-> xT-1
-> xT-2
-> ...
-> x0 (원본 이미지)
본 논문의 기여

- Diffusion 모델이 실제로 고품질 이미지 생성이 가능함을 최초로 입증하였으며, 일부 경우에는 기존 모델보다 우수함을 보인다.
- Training은 Denoising Score Matching 과정과 같고, Sampling은 Langevin Dynamics와 같아 Diffusion을 새로운 모델로 보기보다 기존 score-based generative model과 같은 계열로 볼 수 있는 이론적 연결성을 확보했다.
- Gaussian 기반 transition을 사용함으로써, 복잡한 구조 없이 학습이 가능함을 보인다.
- 특정 순서로 생성하는 것이 아니라 bit ordering 자체를 일반화하였다.
2. Background
Reverse Process : 데이터를 생성하는 모델을 정의하자 !!

- noise에서 시작해서 이미지를 생성하는 과정
- 시작 : xT ~ N(0,I)
- xT -> xT-1 -> xT-2 -> ... -> x0 로 가면서 점점 덜 noisy한 상태로 만든다.
- 한 번에 이미지를 생성하는 것이 아니라, 조금씩 복원하는 형태의 모델이다.\
- 다만, xT만 보고 xT-1의 정답 분포를 알 수 없다.
Forward Process : 반대로 가는 과정을 우리가 만들자 !!

- 이미지에 noise를 조금 추가하는 과정
- x0 -> x1 -> x2 -> ... -> xT로 가면서 결과 완전 noise가 된다.
- 이 과정은 학습을 하지 않고, reverse를 forward 기반으로 학습할 수 있게 된다.
Training Objective (ELBO) : 진짜 likelihood 대신 계산 가능한 목표를 최적화하자 !!
- log pθ(x0) 가 필요하지만, 직접 계산은 어렵다.
- 그래서 ELBO를 도입한다.

- 다만, ELBO는 식이 매우 복잡하고, 직관적이지 않아 계산이 어렵고 그로 인해 학습이 불가능하다.
ELBO 분해 : ELBO를 시간 step별로 쪼개자 !!

- ELBO를 풀어쓰면, 각 step마다 모델이 진짜 분포를 잘 맞추고 있는지에 대한 비교 형태로 변한다.

- 다만, 우리는 q(xt−1∣xt,x0) 를 알아야 KL 계산이 가능하다.
Forward process 기반으로 이 posterior를 계산해보자 !!

- posterior기 Gaussian으로 close-form이 존재한다.
- KL 계산, Loss 계산, gradient 계산이 모두 가능하다.
3. Diffusion models and denoising autoencoders
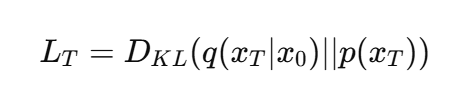
3.1 Forward process and L_T
- forward varience βt는 그냥 고정값으로 쓴다.
- Forward process에서 q는 학습할 게 없기 때문에, 결론적으로 L_T는 상수가 된다. 따라서, 학습에 영향이 없으므로 무시해도 된다.
3.2 Reverse process and L_{1:T−1}
- 목표 : 모델 pθ(xt−1∣xt)가 진짜 posterior q(xt−1∣xt,x0)를 맞추게 한다.
Gaussian 구조 활용
- KL 최소화하려면 평균을 맞추면 되므로, 모델은 posterior mean을 맞추도록 하면 된다.

문제 전환
- 문제 : 정답에 x0가 필요한데, 모델은 xt만 본다.
- 해결 : xt를 다시 표현한다.

- 결과적으로, loss가 µ를 맞추기보다 ɛ를 맞추는 것으로 변환되었고, 이미지 복원 문제에서 노이즈 예측 문제로 전화되었다.
최종 parameterization

- 수식 의미 : 이 이미지에 섞인 노이즈는 무엇인가 (denoising 문제)
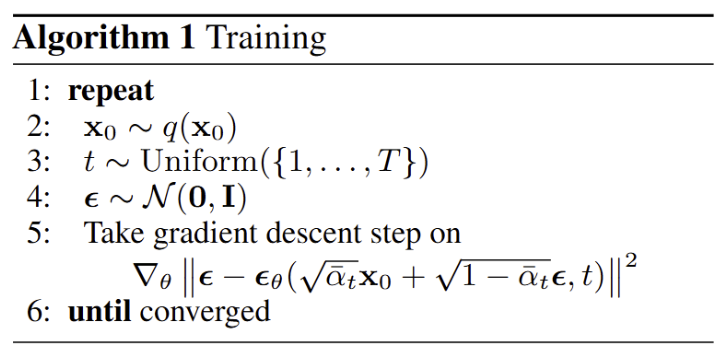
최종 Loss 형태

- 단순 MSE로, 실제 noise와 모델이 예측한 noise를 비교한 값이다.
Algorithm 1 (Training)
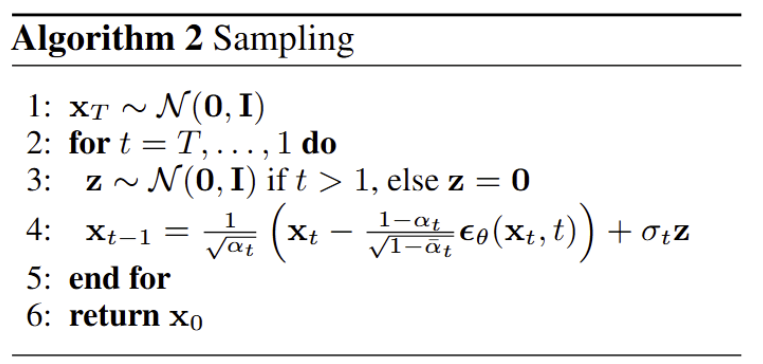
Algorithm 2 (Sampling)
3.3 Data scaling, reverse process decoder, and L_0
Data scaling
- 원본 이미지 : 0 ~ 255
- 모델 입력 : [-1, 1]
- Gaussian 기반 모델에 맞추기 위해 이미지를 연속 공간으로 변환한다.
Decoder의 필요성
- 문제 : 모델은 x0를 연속 값으로 출력하고, 실제 데이터는 이산 픽셀값이라 직접 비교가 불가능하다.
- 해결 : 마지막 단계에 discrete decoder을 추가한다.
- decoder는 Gaussian 분포를 바로 픽셀값으로 쓰지 않고, 각 픽셀 구간에 들어갈 확률로 변환하는 역할을 한다.
- 결과적으로, 실제 이미지 데이터에 대해 올바른 log-likelihood 계산이 가능하다.
L_0의 의미
- 마지막 복원 단계의 loss로, x1에서 x0으로의 복원 정확도를 의미한다.
3.4 Simplified training objective
Section 3.2의 결과

- timestep마다 가중치가 존재하기 때문에, 가중치가 복잡하고 학습 불안정의 문제가 있다.
simple loss : 가중치를 제거하자 !!

- t값이 작으면 noise가 적어 쉬운 문제로 인식하고, 크면 noise가 많아 어려운 문제로 인식한다.
- 따라서, 어려운 문제에 더 집중할 있어, 샘플 품질 향상을 돕는다.
4. Experiments
실험 설정
- T = 1000
- β: 0.0001→0.02 (선형 증가)
- 모델 : U-Net + self-attention
- positional embedding 사용
4.1 Sample quality
실험 내용
- CIFAR-10 기준
- metrics
- IS (Inception Score)
- FID
- NLL
결과
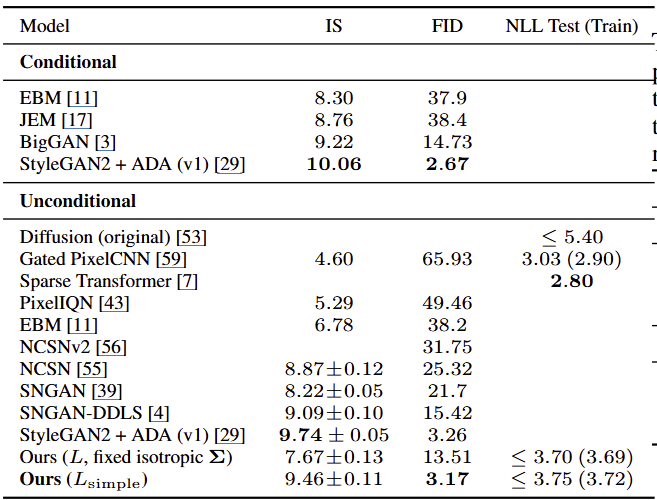
- FID = 3.17로, 기존 모델들보다 우수하며, conditional 모델보다도 좋다.
- Diffusion은 likelihood 최적화보다 샘플 품질 측면에서 강력하다.
샘플 결과
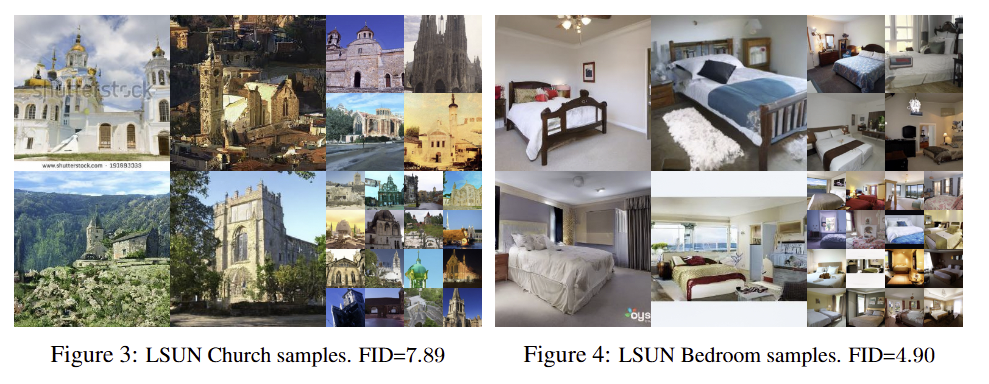
- 매우 자연스러운 구조로, texture 및 lighting이 안정적이다.
4.2 Reverse process parameterization and training objective ablation
실험 내용
- µ 예측 (baseline)
- ɛ 예측 (본 논문 제안)
- varience 학습 vs. 고정
결과
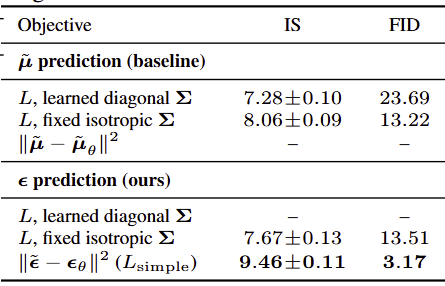
- µ 예측 : variational bound에서만 잘 작동하고, simple objective에서는 성능 나쁘다.
- ɛ 예측 : simple objective에서 가장 좋다.
- varience 학습 : unstable하고, 성능이 낮다.
- 결과적으로, 노이즈 추정 문제로 바꾸는 것이 핵심이다.
4.3 Progressive coding
Progressive lossy compression
실험 내용
- rate-distortion 분석 수행
결과
- train/test gap이 매우 작으며, overfitting이 없다.
- 다만, likelihood 성능이 SOTA는 아니다.
- 결과적으로, Diffusion은 좋은 Generative 모델이지만 likelihood 모델로 최고는 아니다.
그래프 결과
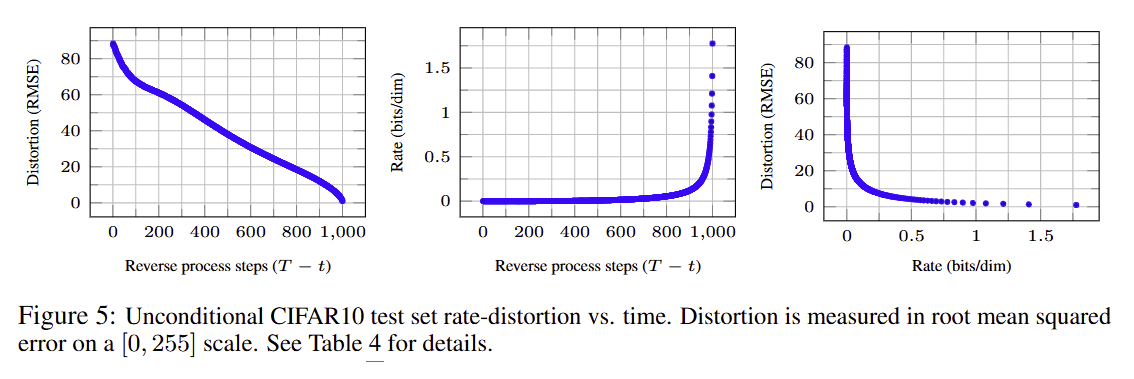
- 초반에는 distortion이 급격히 감소한다.
- 대부분의 bit는 미세 디테일에 사용된다.
Progressive generation
실험 내용
- 생성 과정 중간 상태 관찰
그래프 결과

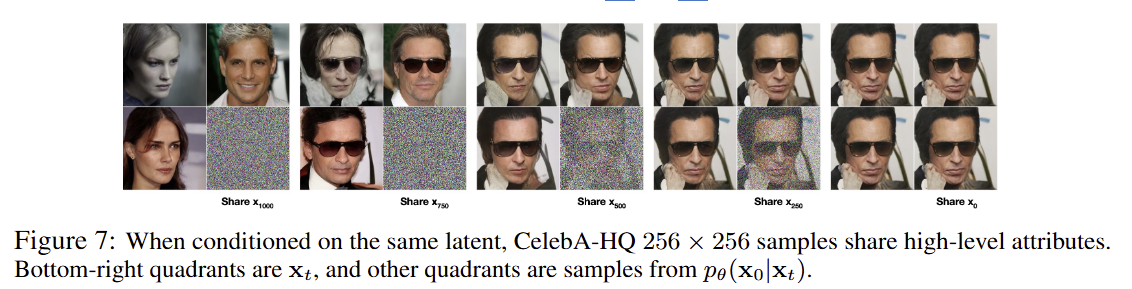
- 초기에는 큰 구조만 생성하고, 후반에 가서 디테일을 생성한다.
- diffusion은 coarse에서 fine 생성 구조를 유지한다.
Connection to autoregressive decoding
Diffusion = autoregressive의 일반화
- Diffusion objective를 재해석하면 autoregressive 형태로 변환 가능하다.
4.4 Interpolation
실험 내용
- latent space에서 interpolation 수행
- reverse process로 복원
결과

- diffusion latent space는 의미 있는 구조를 가진다.
5. Related Work
flows / VAEs
- flows/VAEs : latent 데이터 정보 유지
- Diffusion : 완전한 noise로 만들어버림
Score Matching / Langevin Dynamics
- Diffusion은 새로운 모델이 아니라 score-based 모델을 variational inference로 표현한 것이다.
- training : denoising score matching
- sampling : annealed Langevin dynamics
Markov chain
- 본 연구는 Markov chain 기반 생성 모델은 기존에도 있었지만 Diffusion은 가장 tractable하고 단순한 구조이다.
Energy-Based Model (EBM)
- Diffusion은 EBM까지 확장 가능한 프레임워크이다.
Rate-Distortion / Compression
- diffusion은 단순 생성 모델이 아니라 compression 모델로 해석 가능하다.
Progressive decoding
- Diffusion 생성 과정은 한 번에 복원이 아니라, 점진적인 복원으로 이루어진다.
Autoregressive Models
- Diffusion은 autoregressive 모델의 일반화된 형태이다.
6. Conclusion
의의
- 본 논문은 diffusion 모델을 통해 고품질 생성이 가능함을 입증하고, 이를 score matching·Langevin dynamics·variational inference와 연결하여 생성 모델의 통합적 프레임워크를 제시한 연구이다.
Future work
- 다른 데이터(audio, etc.)로 확장 가능하다.
- 다른 Generative Model 구성 요소로 활용될 수 있다.